Описание
Описание
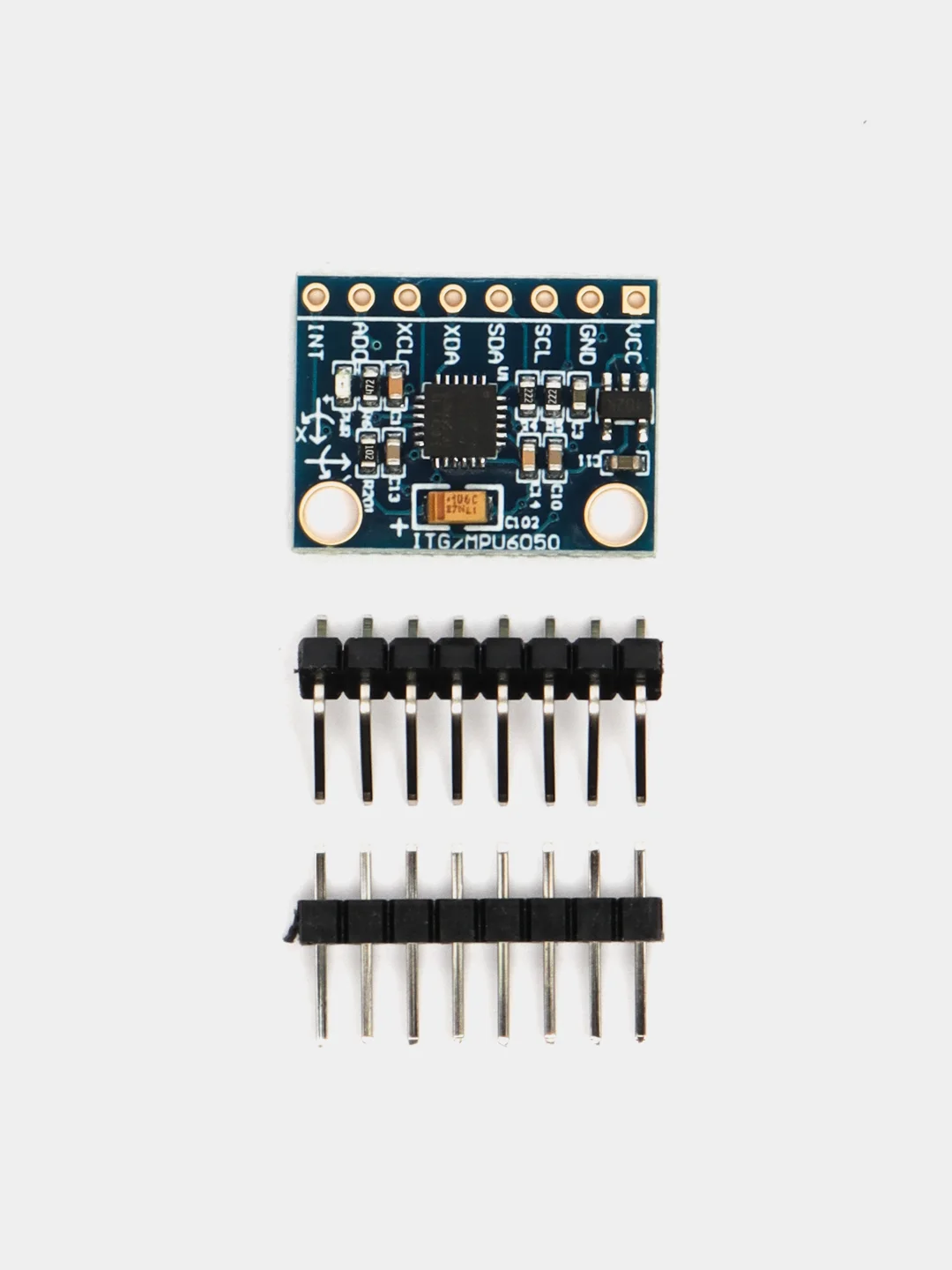
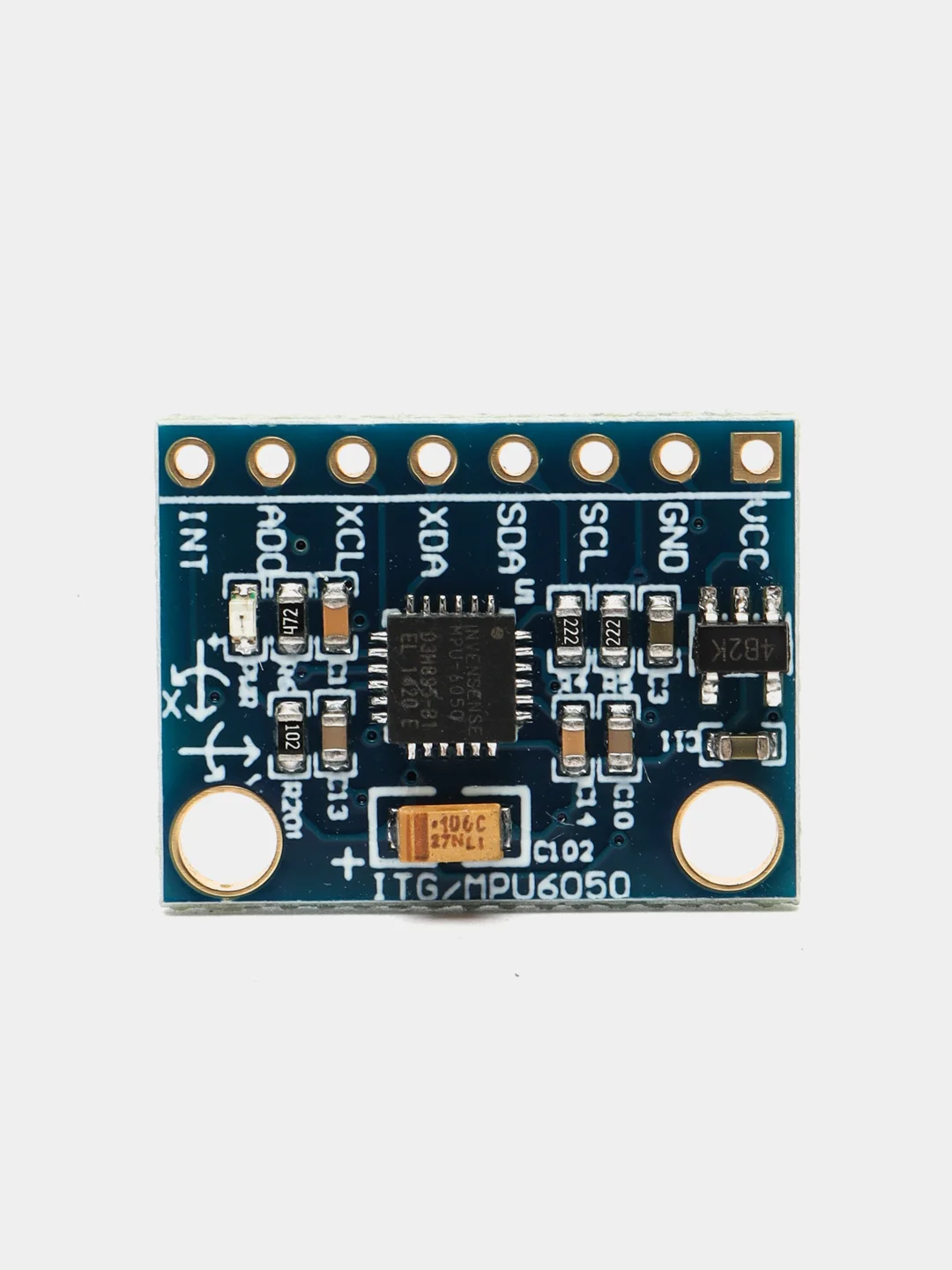
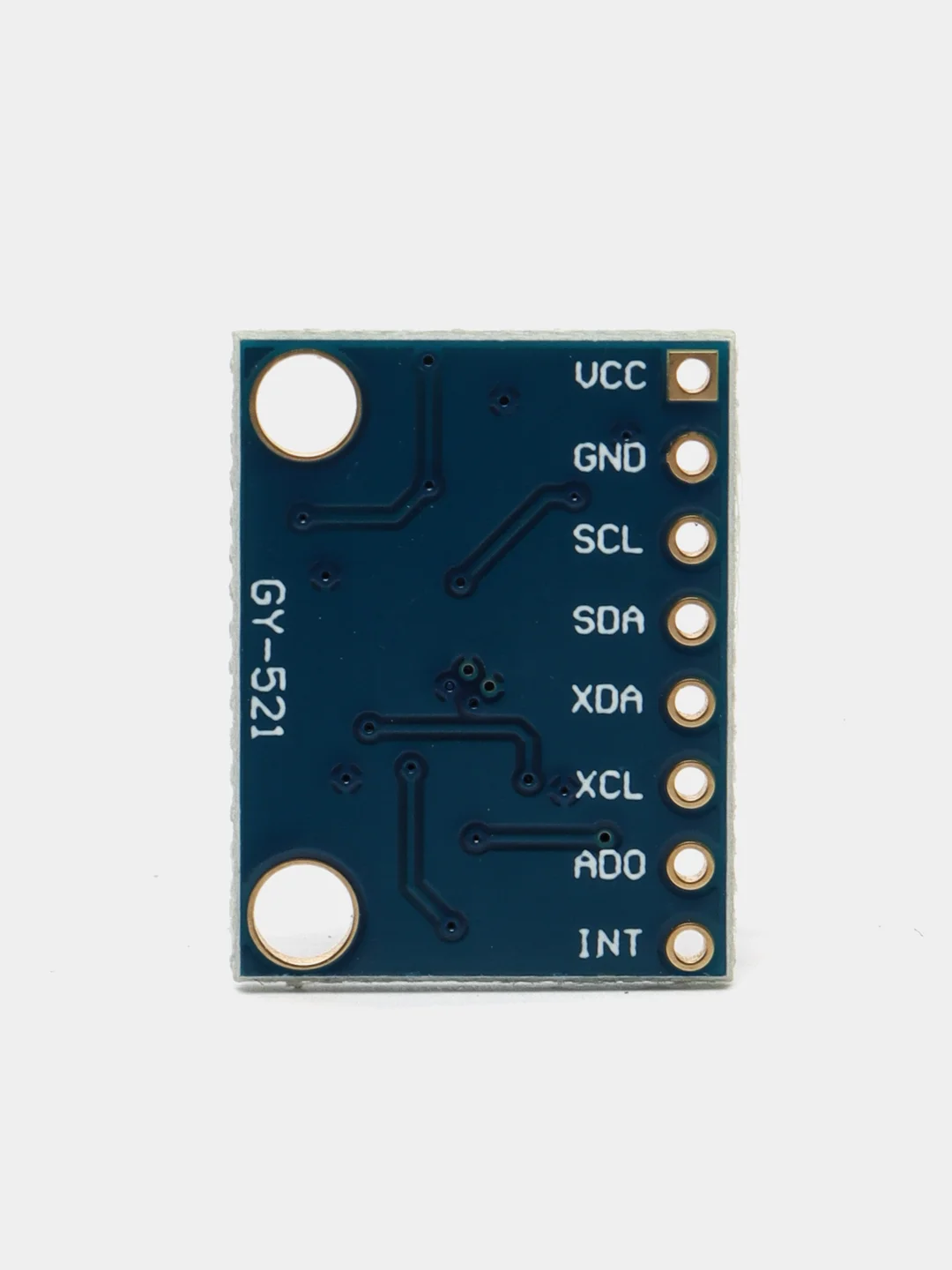
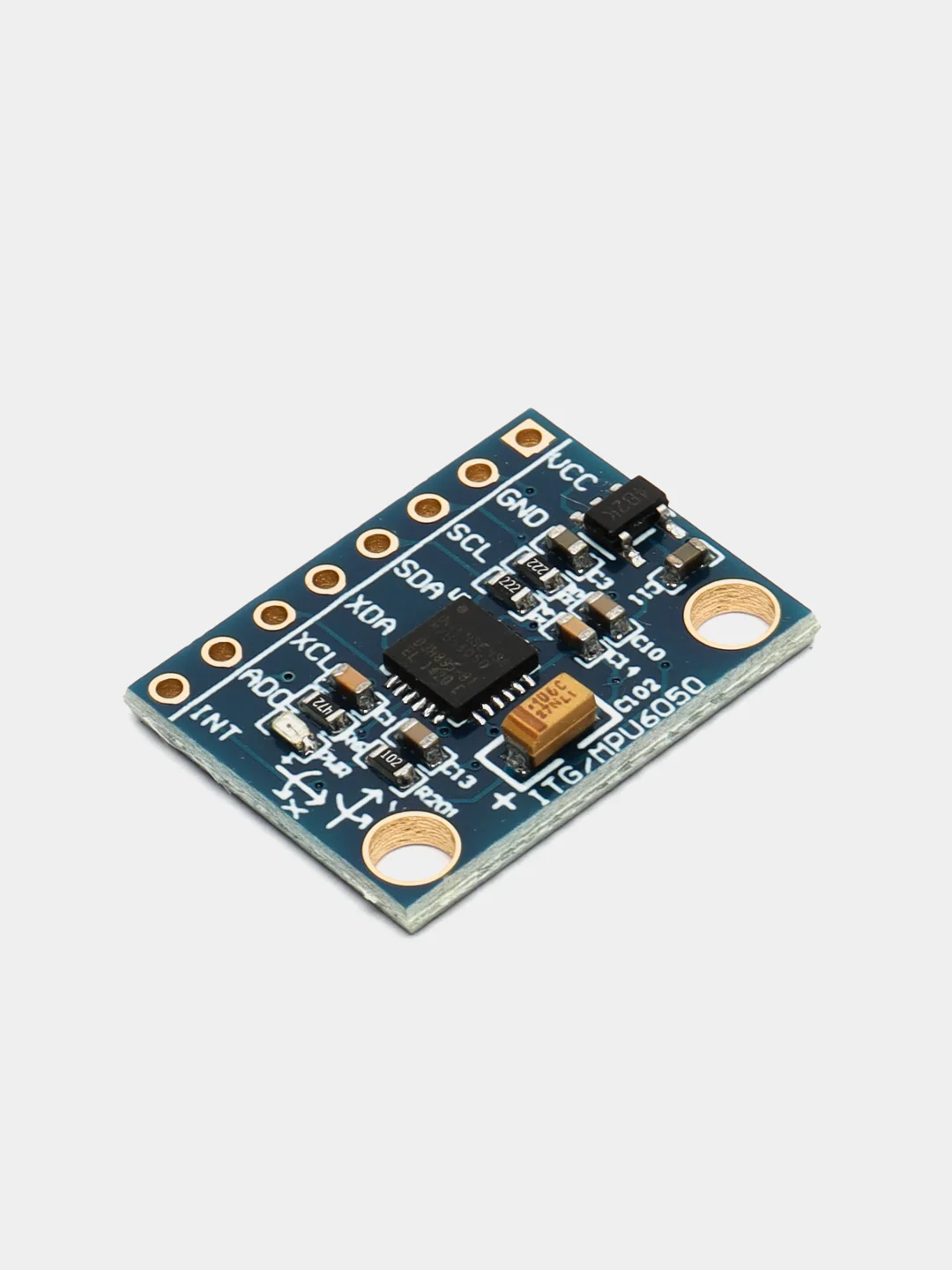
Модуль 3-х осевого гироскопа и акселерометра GY-521 MPU-6050 GY-521 MPU-6050 Module MPU6050 module ,3 Axis analog gyro sensors+ 3 Axis Accelerometer Module Позволяет определить положение и перемещение прибора в пространстве: углы крена, дифферента (тангажа) ориентируясь по вектору силы тяжести и скорости вращения. Измеряет температуру. При перемещении определяет линейное ускорение и угловую скорость по трем осям, что дает полную картину положения. Является электронным аналогом нашего вестибулярного аппарата.
Основа модуля – микросхема MPU-6050. Содержит два устройства акселерометр и гироскоп. Их данные проходят предварительную обработку и передаются по последовательному интерфейсу I2C в микроконтроллер.
Благодаря отслеживанию вектора силы тяжести акселерометр может применяться как электронная альтернатива обычному строительному уровню. На основе акселерометра строят угломеры относительно тяготения земли–инклинометры. Они применяются для контроля за архитектурными сооружениями, при бурении скважин. Комплекс из гироскопа и акселерометра применяется для стабилизации объекта в требуемом положении при внешних воздействиях. Теперь применяя гироскоп-акселерометр GY-521 можно отказаться от джойстика, рукояток и прочих механических устройств в стационарных пультах управления. Интересно применить гироскоп и акселерометром для управления манипулятором. Наиболее интересное применение гироскопа и акселерометра–в движущихся полуавтоматических и автоматических системах. Прибор измеряет и сообщает микроконтроллеру о ускорении и ориентации. Динамические параметры подвижного объекта, которые измеряет модуль 3-х осевого гироскопа и акселерометра GY-521 MPU-6050: тангаж (нос вверх и вниз), рыскание (нос влево и вправо) и крен (по часовой стрелке или против часовой стрелки глядя из кабины объекта). Они в навигационной системе подаются в МК, который рассчитывает текущее положение. Полет квадрокоптера без такого модуля невозможен.
Характеристики:
Питание: 3,7– 5,5В, до 10 мА;
Гироскоп потребляет 3,6 мA, в режиме ожидания 5 мкА;
Акселерометр потребляет 350 мкА, В режиме ожидания: 10 мкА для 1,25 Гц, 20 мкА для 5 Гц, 60 мкА для 20 Гц, 110 мкА для 40 Гц.
Максимальная частота интерфейса I2C составляет 400 кГц.
Формат данных: углы Эйлера, кватернионы, матрица поворота или необработанные данные.
Диапазон гироскопа: ±250, ±500, ±1000,и±2000 градусов в секунду.
Диапазон акселерометра: ±2, ±4, ±8и±16 g 16бит вывода данных.
Резонансная частота 27 кГц Шум 0,005°/с/vГц .
Расстояние между контактами 2,54 мм.
Отверстия под винт 3 мм.
Размеры 20 x 16 мм.